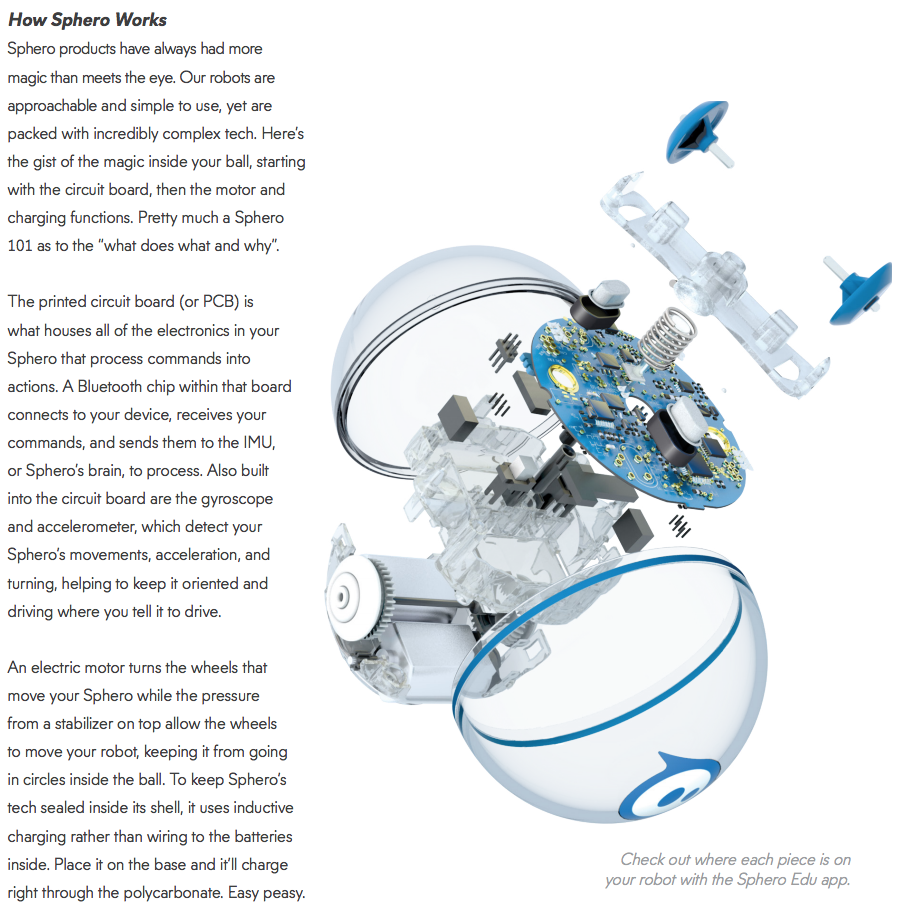
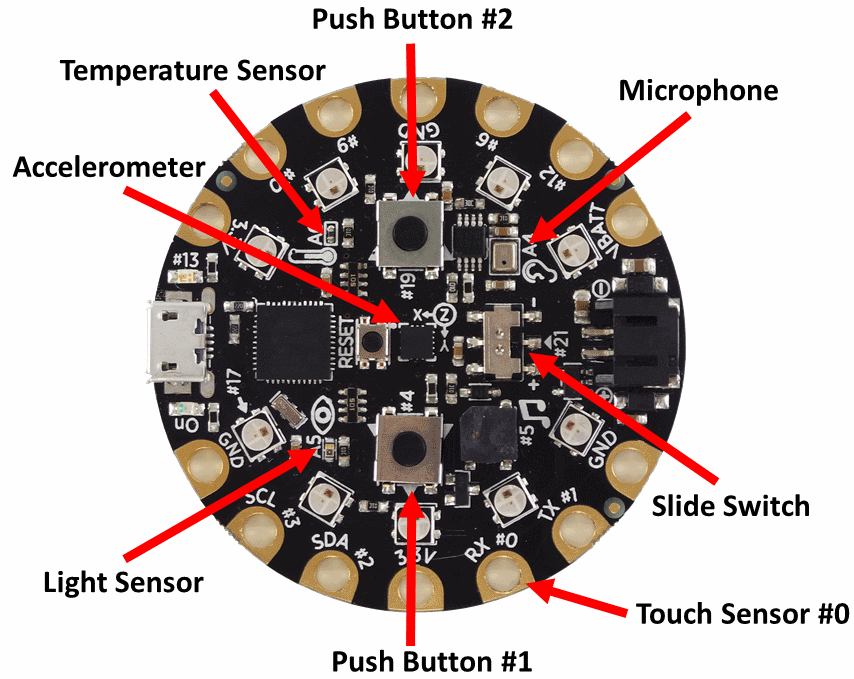
Parts of a robot and Types of sensors *are they input or output?
how does each communicate?
how are they similar and different?